Wrapping the MOVER
The MaSzyna project’s vehicle simulation, implemented mostly as a Mover.cpp with surrounding classes, is appreciated all over the world. Wrapping the original MaSzyna’s physics is a core concept of making a successful port of the simulator.
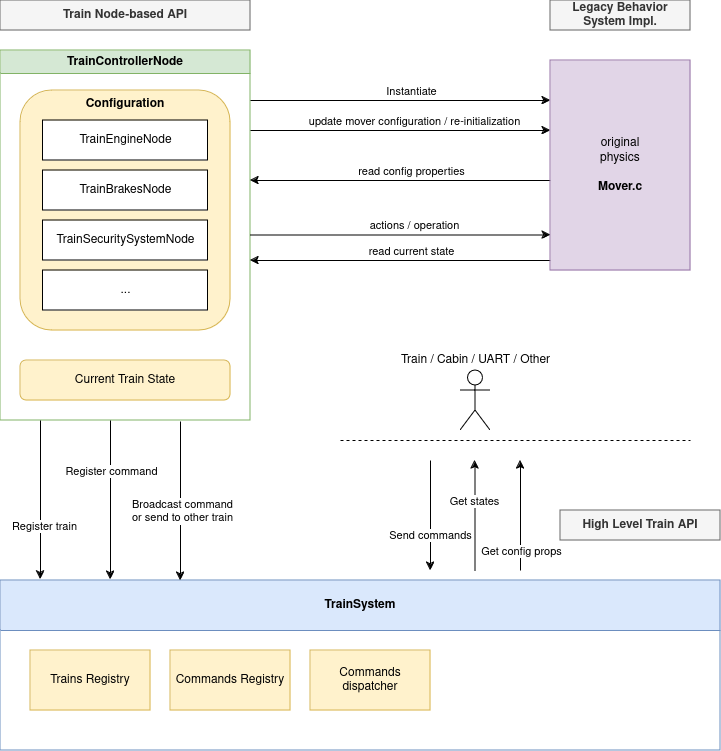
The goal is to expose internal MOVER’s state in High-Level API and MOVER’s configuration through Godot Nodes – in a user-friendly and standarized way.
Responsibility of Godot Nodes:
- integration with Godot’s engine through Scene Tree
- encapsulation of complex and unreadable configuration of the legacy physics system (MOVER)
- bridge between High-Level Commands API and legacy physics system (MOVER) operations
- interface for flexible composition of rail vehicles
- optional internal communication through Godot Signals
- building the current and normalized state of the vehicle
- exposing the vehicle state and commands to the High-Level API
Overall architecture
Mapping key elements to a new architecture
| Element | MaSzyna EU07 | MaSzyna: Reloaded |
|---|---|---|
| Vehicle data container | FIZ files | Godot (T)SCN or res files |
| Vehicle data loading + init | cParser + Mover’s LoadFIZ_*() |
Node properties + _do_update_internal_mover() |
| Reading vehicle state | Direct access to Mover’s properties | Reading Dictionary with a complete state |
| Modyfing vehicle state | Direct calls to Mover’s methods | Direct calls to wrapped methods or sending commands |
| Reading runtime config values | Direct property reading or calls | Reading Dictionary with a runtime config |
| Propagating trainset commands | Internal notification + TTrain refs | Using High-Level API commands |
Basic interface
Extending TrainPart
TrainPart is a base class for implementing a logical subset of Mover’s functionality. To completely wrap the Mover,
follow these steps:
- declare related class attributes as protected members
- define public enums
- imlement public setters and getters for protected members
- expose setters, getters and properties to Godot API (
ClassDB::bind_method(),ADD_PROPERTY()) - expose enums (
VARIANT_ENUM_CAST,BIND_ENUM_CONSTANT) - implement
_register_commands()and_unregister_commands(), if necessary - implement
_do_update_internal_mover(),_do_fetch_state_from_mover(),_do_fetch_config_from_mover(),_do_process_mover(), if necessary - (optionally) declare signals and emit them when necessary; for internal communication
TrainPart::_do_update_internal_mover(TMoverParameters *mover)
Updates a Mover instance based on node properties. The pointer to TMoverParameters is always set.
This method is called when node properties are chaning. It is an equivalent of Mover’s LoadFIZ_* methods.
NOTE: In the legacy game
LoadFIZ_*logic was called just once while loading the scenery, so the state of a vehicle was always clean. MaSzyna Reloaded allows to re-configure vehicles at runtime, but the original Mover can produce unexpected results in such cases. A some “resetting” or re-initializing logic may be necessary to add here.
TrainPart::_do_fetch_state_from_mover(TMoverParameters *mover, Dictionary &state)
This method should read related attributes from Mover instance, and update state Dictionary respectively.
TrainPart::_do_fetch_config_from_mover(TMoverParameters *mover, Dictionary &config)
This method should read dynamic/precomputed Mover config values, and update config Dictionary respectively.
The original Mover is mixing a vehicle state with it’s characteristics like min/max values. These values should be
splitted due to performance isses, and for keeping up minimal set of state attributes. This method will be called only
after Mover’s (re)initialization and will emit a config_changed signal.
Here is an example of brake handle config properties, where type of the handle is defined only as enum or string:
void TrainBrake::_do_fetch_config_from_mover(TMoverParameters *mover, Dictionary &config) {
if (mover->Handle == nullptr) {
return;
}
config["brakes_controller_position_min"] = mover->Handle->GetPos(bh_MIN);
config["brakes_controller_position_max"] = mover->Handle->GetPos(bh_MAX);
}
NOTE: Changing
configwill emit signals
TrainPart::_do_process_mover(TMoverParameters *mover, double delta)
This method will be called on each _process() call (IDLE tick). Use it to wrap game loop methods.
Example:
void TrainDoors::_do_process_mover(TMoverParameters *mover, double delta) {
mover->update_doors(delta);
}
TrainPart::_register_commands()
Registers available commands and callbacks for the vehicle instance. This method will be called when the vehicle will be added to the scene.
NOTE: Callbacks must be exposed to the Godot API via
ClassDB::bind_method()
Example:
void TrainDoors::_register_commands() {
register_command("doors_left_permit", Callable(this, "permit_left_doors"));
register_command("doors_right_permit", Callable(this, "permit_right_doors"));
register_command("doors_left", Callable(this, "operate_left_doors"));
register_command("doors_right", Callable(this, "operate_right_doors"));
}
TrainPart::_unregister_commands()
Removes command callbacks for the vehicle instance. This method will be called when the vehicle will be removed from the scene.
NOTE: Callbacks must be exposed to the Godot API via
ClassDB::bind_method()
Example:
void TrainDoors::_unregister_commands() {
unregister_command("doors_left_permit", Callable(this, "permit_left_doors"));
unregister_command("doors_right_permit", Callable(this, "permit_right_doors"));
unregister_command("doors_left", Callable(this, "operate_left_doors"));
unregister_command("doors_right", Callable(this, "operate_right_doors"));
}
Coding guidelines and limitations
Which properties to wrap / expose
The goal is to build full compatibility with legacy exe, so:
- all handled properties of
FIZfiles must be mapped to node properties - all methods used in command handles in the legacy
TTrainmust be wrapped as commands
But nothing more - Mover may contain unused code, which will be impossible to test.
Naming conventions
Classes and attributes
- classes and enums should be properly prefixed
- keep consistency between names of attributes and setters/getters (
[set_|get_]some_value):int some_value = 0; void set_some_value(const int p_value); int get_some_value(); - prefix setter arguments with
p_ - avoid redundancy in names
- try to keep short names, but do not use abbreviations (readibility counts)
- add comments, but only where necessary
Train state and config
- use new, readable names
- use prefixes and unique key names
- keep consistency in naming schema
- use underscore instead of slash
/(readibility, consistency with class attr names, unification) - use only
[a-z0-9_]
Commands
- use new, readable names
- use short names as possible (i.e. prefer
batteryoverbattery_enable) - avoid the unclear combinations (i.e.
battery_toggle(false)- toggle? or set/enable; orbattery_on("off")) - always prefix command names
- use only
[a-z0-9_]
Example:
var state = {
"battery_enabled": true,
"battery_voltage": 110,
"battery_damaged": false,
"brakes_air_pressure": 0.5,
"brakes_pipe_pressure": 0.5,
"doors_locked": false,
"doors_lock_enabled": fasle,
"doors_left_open": true,
"doors_left_remote_open": true,
"doors_right_open": false,
"doors_right_remote_open": false,
}
Documentation
Documentation is important, because it is well integrated with Godot Editor. Well-documented classes, properties and methods are available in the editor in a built-in documentation browser, tooltips and code completion/hinting. Always check the documentation before merging a pull-request, and try to do the best before submitting a PR.
The goal of this project is also to clean up naming, so wrapped properties may have different names than in MOVER and FIZ files. That’s why is very important to add a FIZ property name to properties description using this syntax:
[code]<FIZ Section>:<FIZ property name>[/code]
Example:
<member name="close/method" type="int" setter="set_door_close_method" getter="get_door_close_method" enum="TrainDoor.DoorControls" default="0">
[code]Doors:CloseCtrl[/code]
Determines method of closing doors
</member>
Check: CloseCtrl in Doors section
This will help users to recognize properties.
Summing up:
- keep the docs up to date
- add
[code]blocks for refrerincingFIZproperties
Default values
In some cases handing defaults can be tricky, but they’re crucial for compatibility. Every property of a node wrapping Mover must have a proper default value set. Many FIZ files from the MaSzyna’s data pack has no values set explicitely, so some vehicle’s properties are just working defaults or they are precomputed by Mover during parsing FIZ files.
To handle defaults properly:
- check MOVER.h declaration
- check realated
LoadFIZ_*section in the original sources - if there are non-simple defaults, introduce some “unspecified” default value and add extra logic (see example for enums)
Enums
- Exposing Mover’s internal enums is prohibited
- Mixing Mover’s enums with new ones is prohibited
- Must be exposed to Godot API (
VARIANT_ENUM_CAST,BIND_ENUM_CONSTANT) - Must start from
0and be consecutive integers (0, 1, 2, … and so on) - Must be properly matched with
PROPERTY_HINT_ENUM - Must be properly mapped to Mover’s enums
- Must be defined in a public class scope
- Names and item names must be unique in a class scope
- Should be documented
- Should be introduced where original Mover is missing enums
TrainDoors::Voltage enum example
Definition in a header file:
namespace godot {
class TrainDoors { // class scope
public: // must be public
enum Voltage { // unique name in the class scope
VOLTAGE_AUTO, // unique enum item names in a class scope (!)
VOLTAGE_0,
VOLTAGE_12,
VOLTAGE_24,
VOLTAGE_112,
};
};
}
VARIANT_ENUM_CAST(TrainDoors::Voltage)
Binding enum items in cpp file:
namespace godot {
void TrainDoors::_bind_methods() {
BIND_ENUM_CONSTANT(VOLTAGE_AUTO)
BIND_ENUM_CONSTANT(VOLTAGE_0)
BIND_ENUM_CONSTANT(VOLTAGE_12)
BIND_ENUM_CONSTANT(VOLTAGE_24)
BIND_ENUM_CONSTANT(VOLTAGE_112)
}
}
Declaration of a private attribute:
namespace godot {
class TrainDoors {
// ...
private:
// setting VOLTAGE_AUTO as default is very important here!
Voltage door_voltage = Voltage::VOLTAGE_AUTO;
// ...
}
}
Implementation of a door voltate setter and getter:
void TrainDoors::set_door_voltage(const Voltage p_voltage) {
door_voltage = p_voltage;
_dirty = true; // mark vehicle config property changed
}
TrainDoors::Voltage TrainDoors::get_door_voltage() {
return door_voltage;
}
Mapping TrainDoorVoltage enum to Mover’s inernal values (for this property Mover has no enum defined) can be
implemented as std::map:
namespace godot {
class TrainDoors {
private:
const std::map<Voltage, int> voltageMap = {
// notice missing VOLTAGE_AUTO - it can't be mapped
{VOLTAGE_0, 0},
{VOLTAGE_12, 12},
{VOLTAGE_24, 24},
{VOLTAGE_112, 112}
};
}
};
The final conversion:
- is an one-way conversion: from the node property to Mover’s attribute,
- it must be implemented with a same logic as in Mover’s
LoadFIZ_*section, - it must handle default value: a case, when
DoorVoltageproperty is not declared in aFIZfile
The original code looks like:
void TMoverParameters::LoadFIZ_Doors(std::string const &line) {
// ...
{
auto const remotedoorcontrol {
( Doors.open_control == control_t::driver )
|| ( Doors.open_control == control_t::conductor )
|| ( Doors.open_control == control_t::mixed ) };
extract_value( Doors.voltage, "DoorVoltage", line, ( remotedoorcontrol ? "24" : "0" ) );
}
// ...
}
The code above is trying to extract DoorVoltage value and store it in Doors.voltage attribute. But in case when
DoorVoltage is not defined in FIZ file or has no value set, 24V will be used if doors are remotely controlled,
0V otherwise.
The logic above must be re-implemented in _do_update_internal_mover(). To do it properly a case when value is not
set in the FIZ file must be handled properly, beacuse Mover is doing some extra checks and finally handles two
possible default values, depending on the other properties (Doors.open_control here).
Note that Godot node properties will use defaults, when they’re not set explicitely in (t)scn/res files. In most cases
it is good enough to set a default value of the attribute to the same value as declared in MOVER.h or
extract_value()’s default argument. But in the DoorVoltage case we have two possible defaults!
Knowing that, the default value for a node property can’t be set to “well-known” value like VOLTAGE_0
(as in MOVER.h original header), because 0V is a value which will be converted to 0 through voltageMap, and
the custom logic for setting a default value will not be executed. So there is necessity to identify an “unspecified”
state, and that’s why VOLTAGE_AUTO enum was introduced and set as a default.
TrainDoors::_do_update_internal_mover(TMoverParameters *mover) {
// ...
bool const remote_door_control = {(
door_open_method == Controls::CONTROLS_DRIVER ||
door_open_method == Controls::CONTROLS_CONDUCTOR ||
door_open_method == Controls::CONTROLS_MIXED
)};
if (voltageMap.find(door_voltage) != voltageMap.end()) {
// use well-known mapped values
mover->Doors.voltage = voltageMap.at(door_voltage);
} else {
// handle "unspecified" case here
mover->Doors.voltage = remote_door_control ? 24 : 0; // no enums in the Mover
}
// ...
}
Command callbacks
Commands must be registered and unregistered via TrainPart:_register_commands() and
TrainPart::_unregister_commands() respectively. Because command callbacks are created in a runtime, they must be
exposed to the Godot API as public methods.
A smart approach is to define public methods that can be called in internal communication within the High-Level Component.
Example:
void TrainDoors::operate_doors(const DoorSide p_side, const bool p_state) {
TMoverParameters *mover = get_mover();
ASSERT_MOVER(mover);
mover->OperateDoors(p_side == Side::SIDE_LEFT ? side::left : side::right, p_state);
}
void TrainDoors::operate_left_doors(const bool p_state) {
this->operate_doors(Side::SIDE_LEFT, p_state);
}
void TrainDoors::operate_right_doors(const bool p_state) {
this->operate_doors(Side::SIDE_RIGHT, p_state);
}
And the registration:
TrainDoors::_register_commands() {
register_command("doors_left", Callable(this, "operate_left_doors"));
register_command("doors_right", Callable(this, "operate_right_doors"));
}
NOTE: Method
operate_doorsis not exposed as a command, but due to this technique it is available for calling by$Train/Doors.operate_doors()directly, which can be handy in internal communication.
Argument type conversion
Godot uses Variant internally to transport variables of many types. Some of built-in types can be automatically casted
to primitives like int or bool, including enums (as they are plain ints). The types conversion works well for most
cases, even for String-type arguments passed to the command.
But for some cases it could introduce some problems, like for casting String to bool, where bool("0") -> true.
In such cases a custom conversion is required.
Mover bugs
You will find bugs in Mover. But the goal is to achieve full compatibiliy, so you must allow them to live. If it was broken, then it must be still broken. Do not fix Mover (do not touch the original code). Do not implement workarounds. Report issue here instead.